
骨科手术机器人
腹腔镜手术机器人

机器人(医疗)领域
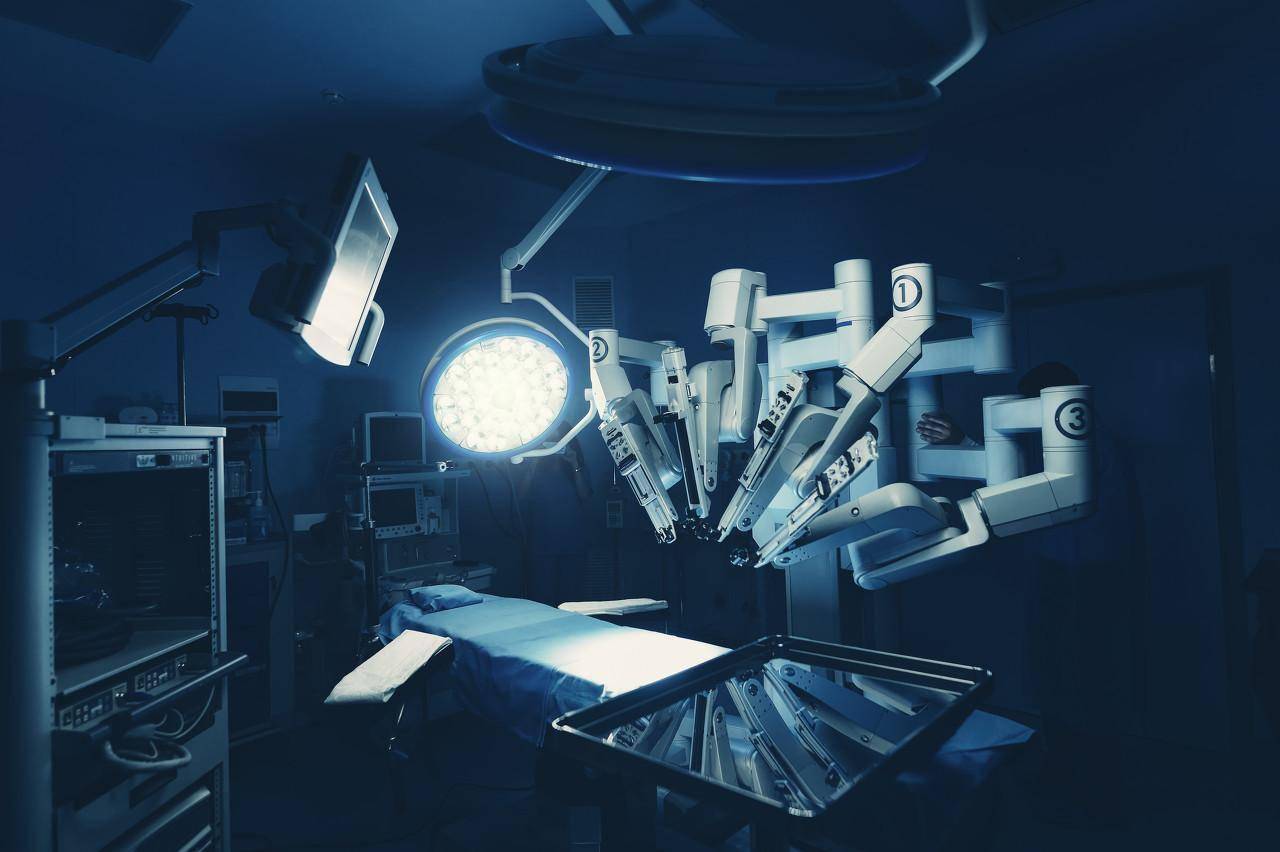
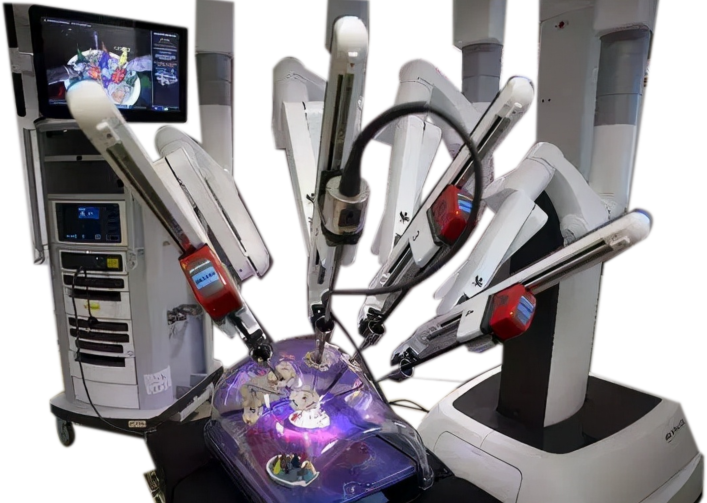
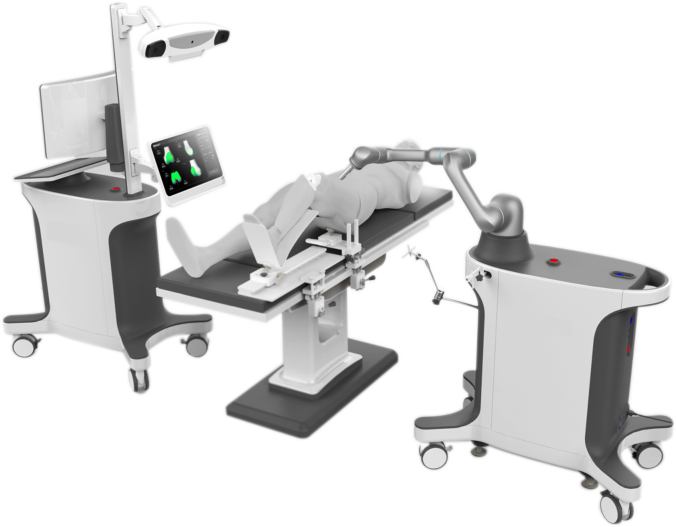
手术机器人发展至今已经有近四十年历史。然而长期以来,受到技术、伦理、制度等各种因素限制,手术机器人的自主作业能力及其在临床应用领域的推广一直发展缓慢。另一方面,在医学临床领域,口腔颅颌面外科一直是数字化外科技术应用的先驱和领军力量,尤其是手术方案较为量化的正颌外科,已经广泛实现了计算机辅助设计和手术导航等数字化技术在临床上的推广应用。引入机器人技术来解决数字化设计在术中的执行问题,成为数字化正颌外科手术当前的迫切需求。本文结合正颌外科手术现有基础和临床需求,搭建了一套基于图像引导的任务自主型正颌手术机器人系统,并设计了机器人辅助正颌手术的工作流程,以提高系统精准性、安全性和自主作业能力为研究目标,针对基于术前设计数据的导航定位和轨迹规划方法开展了深入研究。
应用案例
行业应用


血管介入机器人
穿刺机器人
康复机器人
上海分公司:上海市闵行区梅富路228号春申创意园B栋603室
南京分公司:南京市江宁区竹山路555号B栋2单元426室
电话:021-64762868/025-52093517
邮箱:info@jtmotion.cn
版权所有 稷科工业自动化设备(上海)有限公司 沪ICP备17035577号-1
扫一扫联系微信在线客服
售前咨询:选型计算、规格确认、研讨会申请等
售后咨询:使用方法咨询、故障排除、检修检测
网站更新中


认证标志: